Welcome to another issue of Weekly Embodied AI*. In today's issue, we will start with some follow-ups to last week's links. Last week, I rolled out a new e-mail delivery system, and thoroughly changed the e-mail layout and finally started including images of some selected features. If you have any feedback on how the current e-mail looks, please don't hesitate to let me know.
What I'm most excited about in restarting this newsletter is my new workflow. I managed to automate the feature creation to the point where it only requires me to run a single script to create the e-mail and the web versions of the publication. Working on these changes is quite exciting, and I'm curious to see where this journey takes us.
* This is a playful nod to the recent trend of renaming robotics to Embodied AI.
Open_Duck_Mini: Making a mini version of the BDX droid
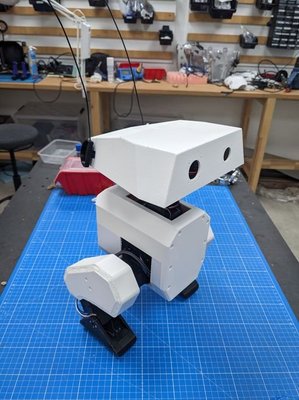
Last week, we’ve featured Disney Research’s paper on how the team build their droid. Now, thanks to Antoine Pirrone, you can build your own mini droid for about $400. I highly recommend checking the latest videos shown in the RADME file to get an idea of the cute gait of this little robot. Super cool!
Rediscovering Quaternions
Since Weekly Robotics restart kicked off with roboticists’ favourite topic of Kalman Filter, I thought it’s good to look into the second favourite topic of quaternions. This article by Jason Fantl is very well written and contains some excellent animations that help understand the issues with Euler angles.
Correct vs Good
Benjie from General Robots continues his excellent streak of high-value articles. This time, the author is discussing correctness and making products that users actually want, and how to find a sweet spot for both of these categories from the point of view of a robotic system developer. I think every project manager involved in robotics, should get this article a go.
Introducing Gemini Robotics and Gemini Robotics-ER, AI models designed for robots to understand, act and react to the physical world.
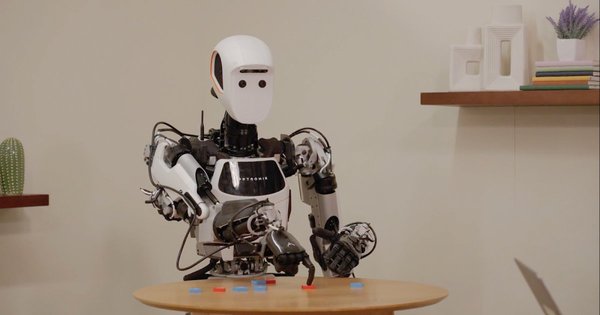
Just last week, we covered Helix from Figure.AI and last week, Google DeepMind announced Gemini Robotics, a vision-language-action (VLA) model, and Gemini Robotics-ER (Embodied Reasoning) model. The demos you will find on the linked website, are very promising, and if you’d like to learn more about this system, have a look at this paper.
ros2_control_explained
Masum made this really nice write-up that explains in detail how ros2_control works. Might come handy if you are using that framework!
PAROL6 Desktop Robot Arm

PAROL6 is a high-performance 3D-printed desktop robotic arm. The design approach of PAROL6 was to be similar to industrial robots in terms of mechanical design, control software, and usability. Control software, GUI, and robots STL files are open-source.
Continuous Integration for PLC-based Control System Development (2022)
This paper, by CERN engineers, describes how they created a Continuous Integration pipeline for Siemens Simatic PLC. The team used gRPC to interface the pipeline with the PLC. This work was applied to a particle accelerator interlock system as a demonstrator.
Fluid Simulation Pendant - mitxela.com

Tim Alex Jacobs did it again, and created an electronics project that I’m considering art. This part of the article really stood out to me:
“I believe that access to a lathe is a fundamental human right, and the entire notion of the hackspace limping along on a trickle of donations is abhorrent to me. This is somewhere where the government should just step in. I mean, forget socialised healthcare, I want socialised workshops! The vast majority of people can’t justify owning big milling machines and lathes, even if they can afford it, but at those times when they are needed, they should be there, for all.”
Two Amazon robots with equal Artificial Intelligence
Have you seen these two AMRs trying to pass one another? I found it quite entertaining.
Events
- ProMat 2025: Mar 17 - Mar 20, 2025. Chicago, Illinois, United States of America
- European Robotics Forum 2025: Mar 25 - Mar 27, 2025. Stuttgart, Germany
- RoboSoft 2025: Apr 23 - Apr 26, 2025. Lausanne, Switzerland
- Farm Robotics Challenge: Apr 24, 2025 (ddl: Dec 12, 2024). Davis, California, United States of America
- 7th International Workshop on Robotics Software Engineering: Apr 28, 2025. Ottawa, Canada
- Robotics Summit & Expo 2025: Apr 30 - May 01, 2025. Boston, Massachusetts, United States of America
- Automate 2025: May 12 - May 15, 2025. Detroit, Michigan, United States of America
- ICUAS (UAVs) 2025: May 14 - May 17, 2025. Charlotte, North Carolina, United States of America
- Xponential 2025: May 19 - May 22, 2025. Houston, Texas, United States of America
- ICRA 2025: May 19 - May 23, 2025. Atlanta, Georgia, United States of America
For more robotic events, check out our event page.