This week, Kimberly McGuire is representing Weekly Robotics at ERF. If you are there, feel free to message Kimberly if you'd like to catch up. I've been told she might carry some of our famous stickers.
Kalman Filter From the Ground Up [Sponsored]
Announcing Newton, an Open-Source Physics Engine for Robotics Simulation
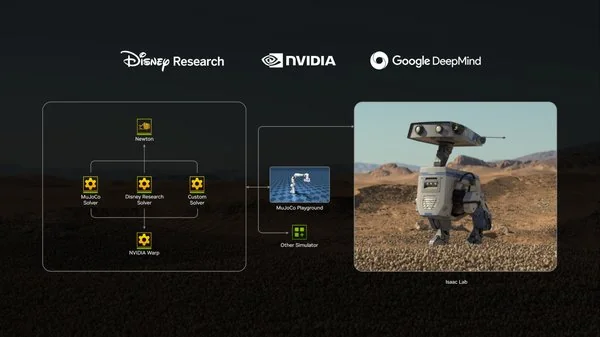
At GTC, NVIDIA announced an open-source physics engine for robotics simulation. This work is being developed by NVIDIA, Google DeepMind, and Disney Research. I recommend checking out the keynote. The keynote features Disney’s BDX droid, that, in my opinion, stole the show. We covered the paper describing this droid in detail two weeks ago. According to the linked article, Newton will be open-soured later this year. Can’t wait!
NVIDIA Isaac GR00T N1
Another announcement from GTC was GROOT N1 (keynote here). After the repo description:
NVIDIA Isaac GR00T N1 is the world’s first open foundation model for generalized humanoid robot reasoning and skills. This cross-embodiment model takes multimodal input, including language and images, to perform manipulation tasks in diverse environments.
Walk, Run, Crawl, RL Fun

Boston Dynamics, in partnership with the Robotics and AI Institute, showcased this demo using Reinforcement Learning with references from human motion capture and animation. If you watch the video, pay attention to Atlas’ hands. A clever design for making a robot that jumps around.
Why Great Engineering Orgs Thrive on “Normal” Engineers
This is an excellent piece from Charity Majors on creating an organization where engineers can thrive, and that making a product where each contributor can easily jump in and help out might be a better strategy than focusing on 10x’ers to move your product forward, especially in more established companies.
Can You Fool A Self Driving Car?

Mark Rober made an interesting video showing an interesting project using a LiDAR scanner, and then doing a range of tests to compare the obstacle detection capabilities of a camera-based system vs LiDAR-enabled one in various conditions.
onshape-robotics-toolkit
The onshape-robotics-toolkit is a feature-rich Python library that significantly extends the capabilities of Onshape’s web-based CAD platform. The library provides a comprehensive API for automating robot design tasks, including solid model manipulation, robot assembly management, graph-based visualizations, and exporting CAD assemblies to URDF files for simulation and control. Intended as a resource for the robotics community, this library leverages Onshape’s REST API to facilitate advanced workflows that bridge CAD design and robotics applications.
2024 ROS Metrics Report
ROS Metric report is out! It’s nice to see ROS 2 usage grow. I find it’s interesting ROS 1 packages still make about 25% of downloads, I hope this number goes way down next year!
ROS 2 Navigation Tuning Guide – Nav2

Since we are on the topic of ROS, Addison Sears-Collins made an excellent blog post describing all parameters in Nav2 with a nice introduction to each configuration category and a description of each parameter together with a value recommendation. I’m sure I’ll be coming back to this guide next time I’m tuning navigation on any robot.
An Algorithm for Affordable Vision-Based GNSS-Denied Strapdown Celestial Navigation

Researchers at the University of South Australia developed a payload for strapdown celestial navigation capable of producing position estimates within 4 km. The team used an Ardupilot-enabled flight controller on a fixed-wing platform and fed the data to the autopilot’s AHRS. In this work, the sensor is treated as a stand-alone source of information, and it’s not fused with EKF or UKF.
Events
- European Robotics Forum 2025: Mar 25 - Mar 27, 2025. Stuttgart, Germany
- RoboSoft 2025: Apr 23 - Apr 26, 2025. Lausanne, Switzerland
- Farm Robotics Challenge: Apr 24, 2025 (ddl: Dec 12, 2024). Davis, California, United States of America
- 7th International Workshop on Robotics Software Engineering: Apr 28, 2025. Ottawa, Canada
- Robotics Summit & Expo 2025: Apr 30 - May 01, 2025. Boston, Massachusetts, United States of America
- Automate 2025: May 12 - May 15, 2025. Detroit, Michigan, United States of America
- ICUAS (UAVs) 2025: May 14 - May 17, 2025. Charlotte, North Carolina, United States of America
- Xponential 2025: May 19 - May 22, 2025. Houston, Texas, United States of America
- ICRA 2025: May 19 - May 23, 2025. Atlanta, Georgia, United States of America
- Eurobot Open 2025: May 28 - May 31, 2025. La Roche-sur-Yon, France
For more robotic events, check out our event page.